6.1 Varför avvattningsanalys behövs
Permanent deformation och många andra typer av skador skulle nästan aldrig finnas om det inte fanns vatten närvarande i vägöverbyggnader och undergrundsjordar. Resultat från ROADEX-projektet visar klart att ett bibehållande av avvattningssystemet i god kondition är den mest lönsamma möjliga underhållsåtgärden på lågtrafikerade vägar.
Se:
Roadex II “Drainage on Low Traffic Volume Roads” och ROADEX III “Developing Drainage Guidelines for Maintenance Contracts”.
För denna process behövs ett effektivt övervakningssystem för avvattningen. En övergripande utvärdering av avvattningssystemet bör utföras vid slutet av varje driftkontraktsperiod, eller med maximalt intervall på 6-8 år. Under utvärderingen bör de problematiska avvattningssträckorna identifieras och behovet av förbättringsåtgärder definieras. Efter det att dessa problemsträckor har identifierats bör deras tillstånd kontrolleras varje år. Resultaten av avvattningsanalysen bör sedan sparas i en databas så att informationen om avvattningen förblir tillgänglig för framtida användning.
En bra övervakning av avvattning och en bra strategi för förbättringsdesign kan indelas i tre faser:
Fas 1. Kartläggning av vägsträckor som lider av bristfällig avvattning
Fas 2. Utförande av en grundläggande diagnos för platserna med avvattningsproblem
Fas 3. Definiering av lösningar för problemplatserna
Visuell undersökning är fortfarande den mest vanliga övervakningsmetoden för avvattningstillstånd, trots att den är subjektiv. Visuella undersökningar av diken och trummor kompletterade med videomaterial, intervjuer av väghållare och driftpersonal, spår- och ojämnhetshistorik och Georadardata ger en bra grund för övervakning av avvattningen. Laserscanningstekniken har nyligen kommit med ett nytt verktyg som kan rekommenderas för avvattningskontroll. Värmekameror har också kommit till ökad användning numera.


6.2 Komponenter i avvattningsanalysen
6.2.1 Allmänt
ROADEX-projektet rekommenderar att tre parametrar hos vägen ska klassificeras vid en avvattningsklassificering, huvudsakligen därför att de kan utföras från en bil i rörelse som filmar en video eller tar fotografier på samma gång. De rekommenderade klassificeringsfälten är:
– Vägens tvärprofil
– Avvattningsklass
– Utloppsdiken

6.2.2 Tvärprofil
Vägens tvärprofil bör klassificeras för att bestämma om avvattningsproblemen är relaterade till en specifik vägsträcka, t ex om de största avvattningsproblemen är lokaliserade till skärningar. Vägens läge i förhållande till den omgivande terrängen (d v s vägavsnittets “tvärprofil”) kan ha en avgörande inverkan på valet av rehabiliteringsmetod för avvattningen. Av detta skäl bör vägens tvärprofil klassificeras under den första avvattningsundersökningen, såväl som vid valet av avvattningslösning. De tvärprofiltyper som använts ROADEX avvattningsanalyser beskrivs i det följande.
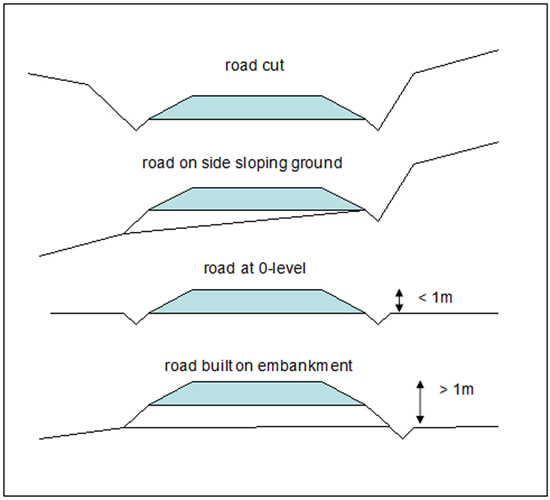




Vägen ligger i en skärning när grundläggningen av vägens överbyggnad ligger under den omgivande terrängen. Det finns vanligen sidodiken på båda sidor av vägen.

Vägen ligger på sidlutande mark när den omgivande marken på ena sidan av vägen ligger under överbyggnadens grundläggning och den andra sidan ligger över grundläggningsnivån. När vägen ligger på sidlutande mark försöker grundvattnet att rinna under eller igenom vägöverbyggnaden.

Vägen ligger på en bank när överbyggnaden yta ligger markant över (> 1m) den omgivande marken. Beroende på vägsträckan kan det vara diken på båda sidor eller bara på den ena sidan.

Vägen ligger på en bank när överbyggnaden yta ligger markant över (> 1m) den omgivande marken. Beroende på vägsträckan kan det vara diken på båda sidor eller bara på den ena sidan.

6.2.3 Avvattningsklasser
För belagda vägar kan avvattningens tillstånd klassificeras i tre kategorier: Klass 1 för bra och ordentligt fungerande avvattning, Klass 2 för ganska bra avvattningstillstånd och Klass 3 för dåliga avvattningstillstånd. Vid klassificeringen är det också viktigt att notera skälen för klassificeringen, såsom hög gräskant vid beläggningskanten eller en instabil sidoslänt, etc. ROADEX-projektet har skapat en speciell klassificering av höga stödkanter på vägar: Klass 0 för inga stödkanter, Klass1 för stödkanter som inte orsakar problem för vägens avvattning och klass 2 för stödkanter som hindrar vattnet från att rinna av beläggningen och orsakar beläggningsskador. I Nordiska länder har stödkantklassificeringen bara två kategorier eftersom kanterna består av “oönskade” vallar av jord och gräs vid sidan av beläggningen som har uppstått på grund av dåligt underhåll. I Irland och Skottland är kanterna designade “tillverkade konstruktioner” som fortfarande byggs i vissa områden. Stödkanter Klass 1 i Nordiska länder täcker de vägsträckor där det inte finns någon hög stödkant och vattnet kan rinna av fritt från vägytan. Klass 2 (det finns kanter) täcker alla vägsträckor med höga stödkanter. Höjden hos kanterna kan variera från låga kanter, som bara har en mindre effekt på avvattningen, till höga kanter som tydligt hindrar vattnet från att rinna av vägytan.



För grusvägar kan avvattningens tillstånd klassificeras i tre kategorier: Klass 1 för bra och ordentligt fungerande avvattning, Klass 2 för ganska bra avvattningstillstånd och Klass 3 dåligt avvattningstillstånd eller där det inte finns några avvattningsanordningar för vägen och där det finns ett klart behov av dem.



Världsbankens HDM4-system rekommenderar att en klassificering av avvattningsystem med 5 klasser ska användas. ROADEX rekommenderar dock att tre klasser ska användas eftersom det visat sig fungera väl i Skandinavien.
6.2.4 Utloppsdiken
Den tredje parametern vid avvattningsklassificering är kontrollen av utloppsdikenas funktion. Ett utloppsdike antingen fungerar eller inte fungerar, så klassificeringen är ett enkelt 0/1-system där utloppsdiket antingen fungerar eller är igensatt. Att kontrollera utloppsdikets tillstånd från en rullande bil är svårt och ROADEX rekommenderar att en tredje videokamera, som filmar med 90° vinkel mot körriktningen, används vid avvattningsanalyserna.




6.2.5 Trummor
Förutom den avvattningsundersökning som utförs från ett rullande fordon bör tillståndet hos trummorna också kontrolleras, allra minst före varje större strukturell förbättring och innan en ny upphandlingsprocess för ett driftkontrakt startar. Undersökning av tillståndet hos trummor tar tid och kostar pengar och av det skälet utförs det inte med automatik vid avvattningsanalyser. En trumanalys bör utföras visuellt och eventuella skador bör dokumenteras med en kamera. Koordinaterna för trummorna bör registreras. Trummornas lägen kan i förväg kartläggas med hjälp av en georadarundersökning med en 400 MHz-antenn.

Tillståndet hos trummor kan kontrolleras på många sätt. Följande checklista är från de svenska riktlinjerna och har visat sig fungera bra vid analys av trummors tillstånd:
- typ (vägtrumma / sidotrumma)
- material (betong, plast, stål etc.)
- storlek (innerdiameter)
- ålder (Hur lång livslängd återstår?)
- kapacitet (Är kapaciteten tillräcklig? Är diametern för liten?)
- grundläggning (Finns det sättningar, d v s är trumman rak?)
- tjälsäkerhet (Fryser trumändarna igen?)
- erosion (Har vattnet orsakat erosionsproblem? Är slänterna stabila i trumändarna?)
- höjd (Ligger trumman för högt?)
- bärighet (Finns det deformationer, skador, hål beroende på bärighetsbrister?)
- vatten (Finns något att notera om flöde, strömningshastighet, kemisk sammansättning?)
- läge (Ligger trumman på rätt plats, på rätt nivå och med rätt längd?)
- utloppsdike (Finns det, behövs det?)
- fyllnadshöjd (Finns det tillräcklig överbyggnad på trumman?)
- miljö (Synpunkter på strömningshastighet, böjning av trummans botten? Kan vatten rinna fritt? Finns det några hinder?)
- trafiksäkerhet (Kan fordon krascha mot trummans ändar?)
Referens:
Bakgrundsdokument till handledning för identifiering av behov av avvattningsåtgärder
Trummorna kan klassificeras i tre klasser:
Klass 1: Trumman fungerar bra; inget underhållsbehov
• Vattnet rinner fritt, inga stora anmärkningar

Klass 2: Ganska bra funktion; trumman behöver rensas / spolas
• 25% eller mer av trummans diameter är fylld med avlagringar
• I trumman finns stenar eller grenar som hindrar vattnets flöde genom trumman
• Vegetation i trumändarna hindrar vattnets flöde

Klass 3: Dåligt fungerande trumma, behov av ytterligare undersökning och vissa underhållsåtgärder
• Sprickor i trumman, trumman är spräckt
• Trumändarna har tryckts upp
• Stabilitetsproblem
• Det finns behov av en trumma, trumma saknas

6.3 Tekniker för avvattningsanalys
Tidpunkten är mycket viktig för en utvärdering av avvattningen. Den bästa tiden för att utföra en avvattningsanalys är på våren omedelbart efter det att snön har smält och innan vegetationen börjar täcka dikesbottnarna. Vid den här tiden kan brister i avvattningssystemet ses klart beroende på vattenmängden i dikena. Datainsamlingen kan starta omedelbart när snön har smält bort från dikena och de skuggiga vägavsnitten och analysen bör avslutas innan vegetationen börjar skyla över dikesbottnen. Avvattningsundersökningar kan också utföras på hösten. Datainsamlingen kan då starta när löven fallit från träden och arbetet bör färdigställas innan snön börjar täcka marken. Det fungerar dock inte lika bra på hösten som på våren beroende på ljusförhållanden och vegetationens omfattning.

Jämförande avvattningsanalyser har utförts på våren och hösten för samma vägnät på ROADEX avvattningstest i Umeå Södra driftområde i Sverige. Enligt resultaten klassificerades den största delen, (nästan 70 %), av dikena i samma klass både på våren och på hösten. Bara en marginell andel av dikena (0,5 %) klassificerades i signifikant bättre eller sämre tillstånd på våren. 18,1 % av dikena var något bättre på våren och 11,6 % var något sämre.

Det fanns flera skäl till skillnaderna. I huvudsak var skälen närvaron av en permeabel undergrund eller vatten i diket. På samma objekt utfördes jämförande observationer av utloppsdiken på våren och hösten. Bara 45 % av utloppsdikena observerades både på våren och på hösten.

ROADEX-rapporten “Summary of Drainage Analysis in the Umeå Area, Sweden, Seasonal Tests and Tools for Outlet Ditch Inventory”.
6.3.1 Utrustning för inventering och datainsamling
6.3.1.1 Allmänt
ROADEX-projektet rekommenderar att inventeringsutrustningen för en avvattningsanalys bör bestå av ett mätfordon, tillräckligt högt för att ge en bra överblick, utrustat med ett avståndsmätningsinstrument (DMI), 2-3 digitala videokameror eller stillbildskameror, GPS-utrustning och en bärbar dator, med all nödvändig programvara för datainsamling. Mätfordonet bör vara utrustat med all nödvändig säkerhetsutrustning. Två personer, en förare och en inventerare, behövs för inventeringen.


6.3.1.2 Video- och stillbildskameror
Tidigare ROADEX-tester och andra arbeten med avvattningsanalyser har visat att en visuell avvattningsbedömning från ett rullande fordon, utan någon dokumentation av avvattningens tillstånd, inte var tillräckligt pålitligt eller repeterbar. Dessutom kunde inte det aktuella tillståndet hos dikena visas igen senare om någon oenighet skulle uppstå. Av dessa skäl rekommenderas att avvattningsanalysernas hårdvara ska bestå av minst två digitala videos, eller stillbildskameror, monterade på mätfordonets tak på en minimihöjd av 2 m ovanför vägytan. En kamera bör filma vägrenen och tillståndet i det angränsande diket och den andra bör filma tillståndet hos beläggningen. Mjukvaran för datainsamling bör ha möjlighet att lagra muntliga kommentarer från datainsamlingen.

Idealt bör en avvattningsinventering utföras med tre kameror, där den tredje kameran är riktad i rät vinkel i förhållande till körriktningen för att kunna filma de utloppsdiken som mätfordonet passerar. Outputen från den kameran kan användas för att klassificera tillståndet hos utloppsdikena. Kvaliteten på videokamerorna och stillbildskamerorna bör vara tillräckligt hög för att samla in den information som krävs med en upplösning på minst 640×480 pixels. Alla kameror bör fokuseras på ett avstånd av 10 till 15 m från mätfordonet och slutarhastigheten bör vara tillräckligt hög för att ge skarpa bilder.
6.3.1.3 Annan utrustning som kan användas vid avvattningsanalyser
Värmekamera
En värmekamera, också kallad infraröd-kamera, mäter den strålning som emitteras från omgivningen i det infraröda frekvensområdet. Kameran formar en videobild från strålningen som liknar en traditionell video. “Normala” kameror som är baserade på ljus, mäter vanligen frekvensen hos synbart ljus 450-750 nm. En värmekamera kan som jämförelse mäta frekvenser så höga som 14 000 nm.

Priserna på värmekameror har på senare tid varit ganska höga, eftersom tekniken är ny och det är korta produktionsserier. För närvarande ligger priserna på värmekameror högre än 5,000 €. Priset på högkvalitativa kameror kan även ligga högre än 30,000 €. Dessa högkvalitativa kameror kan vara användbara för att utföra skadeinventering av beläggningar.
Vid en avvattningsanalys bör kameran fästas på taket av mätfordonet på samma sätt som en digitalkamera. “Normal” digital video och GPS-koordinater bör också registreras samtidigt som mätningen med värmekamera utförs. Värmekameran bör idealt riktas mot diket medan en del av vägen behålls i vyn. Mätfordonets hastighet bör vara begränsad till 30 km/h under undersökningen.

Den bästa tiden för att utföra en undersökning med värmekamera vid an avvattningsanalys är i maj eller i början av juni. Den bästa tiden på dagen för att utföra undersökningen är på småtimmarna eller tidigt på morgonen. Värmestrålning från solen har ingen effekt på resultatet under dessa tider. Värmestrålningen från solen kan värma upp markytan betydligt.

Resultaten från värmekamera kan delas in i fem klasser efter temperaturen på bottnen av diket. Temperaturklasserna är:
– Klass 1: Mycket hög relativ temperatur
– Klass 2: Hög relativ temperatur
– Klass 3: Medeltemperatur
– Klass 4: Låg relativ temperatur
– Klass 5: Mycket låg relativ temperatur

Laser scanners
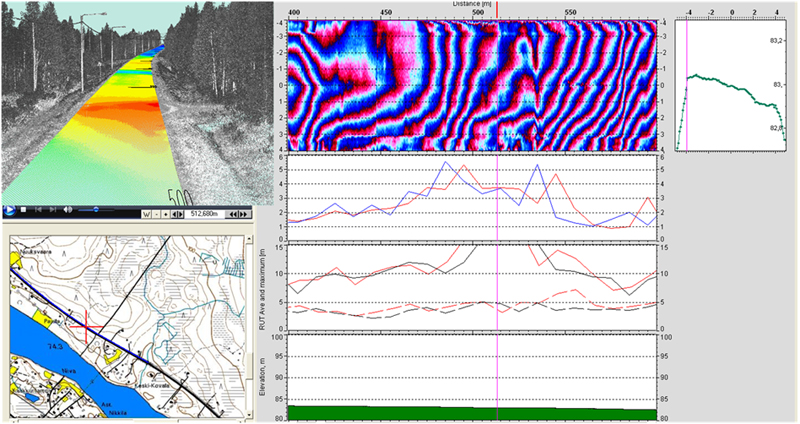
Populariteten för användning av laserscanners vid vägundersökningar har ökat markant under de senaste åren och det är ofrånkomligt att tekniken kommer att bli ett standardverktyg för ett antal arbetsuppgifter vid hantering av vägars tillstånd. Laserscanning är en metod där avståndsmätningen beräknas från färdtiden för en laserstråle från laserscannern till målet och tillbaka. När laserstrålens vinkel är känd, och strålar sänds ut i olika riktningar från ett fordon i rörelse med känd position, är det möjligt att göra en tredimensionell (3D) ytbild, ett “punktmoln”, av vägen och dess omgivningar. I punktmolnet, med miljontals punkter, har varje punkt en x-, y- och z-koordinat och ett antal reflektions- eller emissionsegenskaper.




En laserscanner består av tre delar: laserkanonen, en scanner och en detektor. Laserkanonen producerar laserstrålen, scannern cirkulerar laserstrålen och detektorn mäter den reflekterade signalen och definierar avståndet till målet. Avståndsmätningen är baserad på ljusets färdtid, eller fasförskjutningen, eller en kombination av båda.
Kvaliteten och priset på de mobila undersökssystemen för laserscanning varierar men de kan grovt delas in i två kategorier a) högeffektiva system med stor noggrannhet, också benämnda “LIDAR” och b) billigare “var mans” laserscannersystem som har begränsad avståndsmätningsmöjlighet och noggrannhet.



Resultat från laserscanning kan användas på olika sätt vid undersökning av lågtrafikerade vägar. En tvärprofil av vägen kan ge bra information om spårformen och om det finns kanter som hindrar vatten att rinna av från beläggningen. En karta som visar ytnivåerna i färgkoder kan prepareras för att identifiera platser med diken fyllda med rasmassor och igensatta trummor. Förändringar i vägbredd kan också lätt ses från dessa kartor. När andra vägundersökningsdata kombineras med laserscanningsdata kan de ge utmärkt basinformation för att fastställa om dålig avvattning orsakar deformation eller tjälproblem.


6.3.1.4 Positioneringsutrustning
Avvattningsundersökningar bör utformas så att det säkerställs att alla videos, stillbilder och resultat från klassificering av avvattningen kan märkas och länkas till GPS-koordinater och till adresser i vägdatabasen. För att säkerställa detta bör all positionering utföras med användning av differential GPS-utrustning eller annan GPS-utrustning med DGPS (-> FAQ) noggrannhet. Det rekommenderas också att en DMI används som tillägg till GPS under datainsamlingen. GPS ger vanligen en z-koordinat och, även om den absoluta höjden inte är särskilt noggrann, kan informationen användas vid avvattningsanalysen för att hitta de högsta och lägsta punkterna längs vägen.

6.3.1.5 Inventeringspersonal
Inventeringspersonal, speciellt inventeraren, bör vara tillräckligt tränad så att hon/han på ett tillförlitligt sätt kan identifiera de tillståndsklasser som satts upp i riktlinjerna för avvattningsanalysen. Föraren av inventeringsfordonet bör på samma sätt vara förtrogen med klassificeringen om avsikten är att han/hon ska medverka vid inventeringen. All personal bör vara tränad i att genomföra inventeringar och vara insatt i alla säkerhetsfrågor.

All inventeringspersonal bör ges en dags träning innan inventeringssäsongen börjar, där alla moment som är relaterade till avvattningsanalysen kan övas in. En fältövning bör inkluderas under träningsdagen där inventeringspersonalen kan utföra en avvattningsanalys på en utvald vägsträcka. Senare kan resultaten från olika operatörer jämföras med varandra på kontoret.
6.3.2 Datainsamling
Avvattningsanalyser bör utföras på en vägsträcka i taget, och båda sidorna av vägen bör analyseras separat. Undantaget är de vägar som är smalare än 5,5 m, där inventeringen kan utföras i en riktning.

Under datainsamlingen bör undersökningsfordonets hastighet begränsas till mellan 20-30 km/h och fordonet bör framföras nära beläggningskanten för att ge kameran en hinderfri bild av diket och dikesslänterna. Operatören bör registrera den initiala tillståndsklassen hos avvattningen på sido- och utloppsdiken med användning av tangentbordet på den bärbara dator som används för datainsamling, och samtidigt spela in kommentarer beträffande undersökningen genom ljudfilen till den digitala videon. Typiskt bör dessa kommentarer inkludera:
• klassificering av avvattningens tillstånd;
• klassificering av vägens tvärprofil;
• korrigeringar av felaktiga tangenttryck vid inventeringen som behöver korrigeras senare;
• observationer om höga gräskanter eller beläggningsskador som hindrar vattnet från att rinna av till diket;
• noteringar om jordras från inner- och ytterslänter till dikesbottnen, som hindrar vattenflödet
Dessa typer av muntliga kommentarer har visat sig vara mycket värdefulla för att säkerställa kvaliteten och repeterbarheten hos inventeringen
6.3.3 Att spara och lagra data
All insamlad data från fältinventeringen bör sparas dagligen i den bärbara datorn och på en extern hårddisk. Dessutom bör back up på analysarbetet på kontoret göras ofta. Videos kan konverteras till stillbilder för att spara minnesutrymme innan resultaten från dräneringsanalysen levereras till väghållaren.
6.4 Analys av resultat från avvattningsanalysen
6.4.1 Allmänt
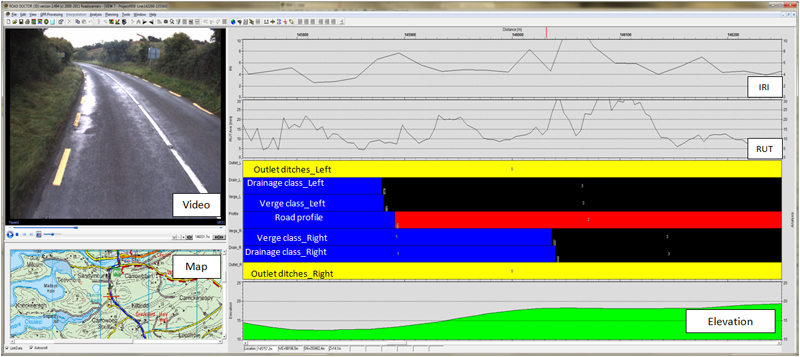
Det första steget i processen är att länka all insamlad data från fältinventeringen till ett projekt som upprättas för varje vägsträcka. Detta kan utföras t ex med Road Doctor Designer ® eller liknande dataprogram, där de initiala resultaten från avvattningsanalysen, tvärprofilsdata, digitala videos och stillbilder kan länkas till rumsbestämda data. Vägytedata (spår och ojämnheter) bör också länkas till projektet, företrädesvis de fem senaste årens historiska data. Dessa data kan vanligen erhållas från väghållarens databas eller mätas på objektet. När detta väl har gjorts kan den huvudsakliga avvattningsanalysen utföras med ett antal olika tekniker, beroende på typen av täckning hos vägytedata. Antingen 10 meters eller 20 meters medelvärden av vägytedata bör användas. Medelvärden över 100 meter är för långa för att ge tillförlitliga avvattningsanalyser. Korrelationen mellan beläggningsskador och avvattningstillstånd bör också noteras vid den här tiden.

För grusvägar bör resultaten från avvattningsanalysen jämföras med resultat från tjälinventeringen på våren, och vägskador som upptäckts på vägen på videos och stillbilder. En mycket bra parameter att jämföra med, om den finns tillgänglig, är BCI-värdet beräknat med hjälp av resultaten från en fallviktsmätning (FWD).


Jämförelse mellan tjällyftning och avvattning kan också utföras i det skedet, t ex genom användning av IRI-resultat från vintermätning eller antennsvängningsdata från en georadarundersökning. Jämförelsen kan också utföras med användning av ny Laserscannings-teknik. Det är en utmärkt metod för att lokalisera problemavsnitt på vägar.
6.4.2 Klassificering av avvattning på belagda vägar
ROADEX avvattningsklassificering av belagda vägar beskrivs som följer:
Klass 1: Bra avvattningstillstånd
Beskrivning: Felfri avvattning. Formen på vägens tvärprofil är väl bevarad och vatten rinner från beläggningen till diket utan hinder. Vatten rinner obehindrat i dikena.

Klass 2: Godtagbart avvattningstillstånd
Beskrivning: Deformationer och skador är tydliga i tvärprofilen. Vägrenen kan ha en hög stödkant och/eller tät vegetation som orsakar pölbildning på körbanan eller på vägrenen. Vegetation i diket hindrar vattenflödet och orsakar dammar i diket. Ostabil jord flyter från dikesslänterna ner i dikena och blockerar vattenflödet. Igensatt trumma eller utloppsdike hindrar vattenflödet i diket. Vägen saknar avvattningssystem.

Klass 3: Dåligt avvattningstillstånd
Beskrivning: Deformationer och skador är tydliga i tvärprofilen. Vägrenen kan ha en hög stödkant och/eller tät vegetation som orsakar pölbildning på körbanan eller på vägrenen. Vegetation i diket hindrar vattenflödet och orsakar dammar i diket. Ostabil jord flyter från dikesslänterna ner i dikena och blockerar vattenflödet. Igensatt trumma eller utloppsdike hindrar vattenflödet i diket. Vägen saknar avvattningssystem.

Vid utförande av en avvattningsanalys för belagd väg bör korrelationen mellan vägens nedbrytning och avvattningens tillstånd undersökas. Detta kan utföras med flera metoder:
A. När vägytedata är tillgängliga från flera av de senaste åren. Med den första metoden, beräknas den årliga tillväxten av spårdjup från historiska data genom användning av en linjär regressionsmodell. Detta kräver dock att vägytedata är tillgängliga från flera år. Där vägen nyligen blivit omasfalterad utan större förändringar av dess karaktär (d v s utan strukturell rehabilitering), kan äldre data som samlats in före omasfalteringen också användas.

Spårökningstakten kan anses vara normal om spårtillväxten är mindre än 0,8-1,0 mm/år för trafik (ÅDT) < 5000 fordon per dag, och < 1.4 mm/år för trafikflöden större än 5000 fordon per dag. Spårökningstakten kan anses vara hög, och extremt problematisk, om den är större än 2 mm per år. Det är svårt att definiera tillväxttakter för IRI-värden för bra och dåliga tillstånd och som ett resultat är kartläggning av IRI-värdets tillväxt vanligen inte nödvändig.

B. När vägytedata bara är tillgängliga från ett år. Om vägytedata bara finns tillgängliga från ett år från databasen tillsammans med kunskap om vilket år vägen senast asfalterades kan ett andra alternativ användas. För detta beräknas spårtillväxten med en linjär modell, där linjen definieras av två kända punkter: det initiala spåret från beläggningsåret och de senaste spårdata från vägytemätningen. För beläggningsåret kan en initial spårbildning på 2 mm användas.

C. Genomsnittliga spår- och IRI-data i olika tillståndsklasser hos avvattningen. I tillägg till vad som nämnts tidigare kan genomsnittlig spårbildning och IRI-värden beräknas separat för varje vägavsnitt och varje tillståndsklass för avvattning baserat på senaste data. Eftersom tillståndsklass för avvattningen redan har analyserats för båda vägsidorna separat, bör den sämsta tillståndsklassen användas för de statistiska beräkningarna av IRI och spårbildning. Dessa värden kan sedan jämföras med värdena för avvattning Klass 1. Om, baserat på denna beräkning, genomsnittsvärdena för avvattningstillstånd Klass 2 och 3 är mer än 5 % högre än värdena för avvattningstillstånd Klass 1, kan det antas att den dåliga avvattningen påverkar nedbrytningens hastighet. Denna information kan senare användas vid val av de vägavsnitt som kräver speciellt underhåll.


Beläggningens ”livslängdsfaktor” kan också beräknas i den statistiska analysen. Livslängdsfaktorn beskriver hur dålig avvattning kan påverka beläggningens livslängd. Livslängdsfaktorn definieras genom att beräkna spårbildningen hos de 10 % sämsta sektionerna, och möjligen genomsnittlig ojämnhet, och jämföra dessa resultat med genomsnittligt spårdjup för avvattningstillstånd Klass 1. Om det är mer än 10 % vägavsnitt med avvattningstillstånd Klass 3, är det förhållande som ska användas, förhållandet mellan de genomsnittliga spårdjupen för vägar Klass 3 och Klass 1. I de fall, då det är mindre än 10 % i avvattningstillstånd Klass 3, beräknas livslängdsfaktorn som ett förhållande mellan vägar Klass 3 och Klass 2.

6.4.3 Klassificering av avvattning på grusvägar
ROADEX beskrivning av klassificeriing av avvattning på grusvägar eller skogsbilvägar beskrivs nedan:
Klass 1: Bra avvattningstillstånd
Beskrivning: Felfri avvattning. Tvärprofilens form är välbevarad och vatten rinner från överbyggnaden till diket utan hinder. Vatten rinner utan hinder i dikena.

Klass 2: Godtagbart avvattningstillstånd
Beskrivning: Små förändringar i formen på vägens tvärprofil kan förekomma. Vägrenen har små stödkanter eller vegetation som hindrar ett bra vattenflöde till diket. Vegetation i diket begränsar vattenflödet och orsakar dammar. Liten mängd jord flyter från vägslänterna ner i dikena och höjer dikets botten, sänker vattenflödet och höjer grundvattenytan.

Klass 3: Dåligt avvattningstillstånd
Beskrivning: Deformationer och skador är tydliga i vägens tvärprofil. Vägrenarna kan ha en hög stödkant och/eller tät vegetation som orsakar pölbildning på körfältet eller på vägrenen. Vegetation i diket hindrar vattnets flöde och orsakar dammar i diket. Ostabil jord flyter från dikesslänterna ner i dikena och blockerar vattenflödet. Igensatt trumma eller utloppsdike hindrar vattenflödet i diket. Vägen saknar avvattningssystem.

Det viktigaste vid planering av en avvattningsanalys för en grusväg är att definiera de vägavsnitt som har en korrelation mellan tjällyftningsskador och avvattningstillstånd, med andra ord att ta reda på var dålig avvattning utgör huvudskälet till tjällyftningsskadan. Detta kan utföras med användning av kartanalyser och ett designprogram som visar läget och historiken av tjällossningsproblem, avvattningsklasser och video eller stillbilder från vägen. Om det inte finns några detaljerade dokumenterade data från tjällyftningsskador, kan potentiella tjällyftningsplatser lokaliseras från en inventeringsvideo som tagits under tjällossningen. En värmekamera eller tjällyftningsmätning med laserscanner kan också användas för att lokalisera platser med tjällyftning.

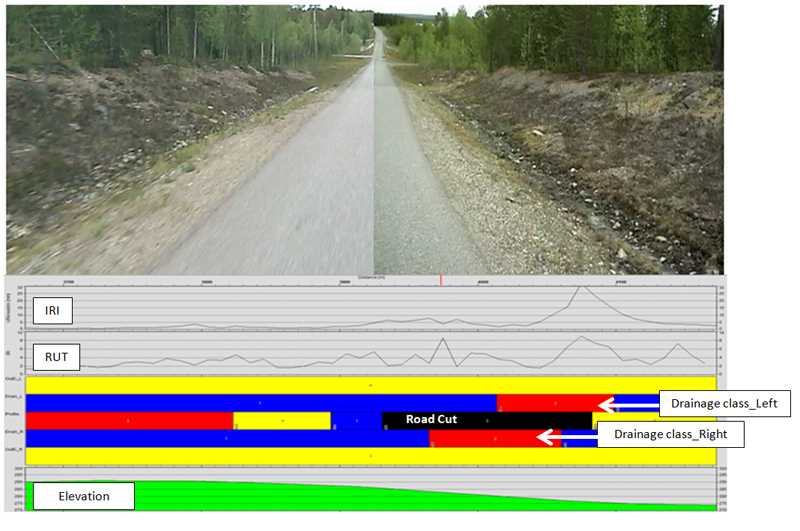
Den översta raden visar resultaten från avvattningsanalysen och där nedanför visas tjällyftningshistoriken 2001-2006. Därunder finns deflektionsbassänger mätta med FWD. Raden nederst visar IRI-resultat från vintermätning. Dessa kan användas för att lokalisera sättningar orsakade av tjällyftning.
Vid definiering av tvärprofilen på grusvägar bör speciell uppmärksamhet ägnas åt vägavsnitt som ligger på sidlutande mark och tillståndet hos vägdiket som ligger på sidan med högre mark. Tjällyftningsskada och släntras är vanligen koncentrerade till dessa typer av vägavsnitt

Läget för alla jordskred eller glidande jord på inner- och ytterslänter bör noteras och registreras i resultaten från avvattningsanalysen. Att dumpa bortschaktade material från dikesrensning bör inte tillåtas i dessa områden

6.4.4 Utloppsdiken
Vid presentation av resultaten från avvattningsanalysen rekommenderas att läget på utloppsdikena, som behöver rehabiliteras, bör visas på en karta eller i en tabell. Tabellen bör visa vägadressen, dikets lokalisering (vänster eller höger) och längdsektionen.


Problem kan dock uppstå vid försök att inventera, identifiera och klassificera tillståndet hos utloppsdiken från ett fordon i rörelse med framåtriktade kameror, och som ett resultat av detta är denna metod inte alltid framgångsrik. Det rekommenderas därför vid utförande av avvattningsanalys på kontoret att läget på utloppsdikena ska bekräftas genom användning av Z-koordinater från GPS-data som samlats in under inventeringen. Vanligen finns det ett utloppsdike i varje lågpunkt i vägens linjeföring. Om stillbilder samlas in bör fordonet stanna till vid varje utloppsdike för en tillståndsbedömning.

Slutligen, som rekommenderats tidigare i detta paket, möjliggör en tredje kamera som pekar i 90º vinkel mot körriktningen för inventeringsfordonet, att tillståndet hos diket kan bedömas senare från videon eller stillbilderna.
6.5 Lokalisering av problemområden
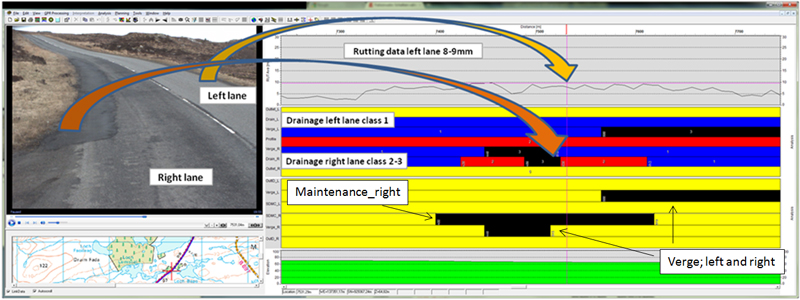
Urvalet av vägavsnitt med speciellt avvattningsunderhåll för avvattningsplaner och/eller avvattningsdriftkontrakt utförs vanligen med användning av en speciell mjukvara. Vid detta arbete skapas en integrerad vy där alla data kan ses på samma gång: d v s video- eller stillbilder av vägen, en karta, spår- och IRI-historik, årlig ökning av spårbildning (om det har varit möjligt att beräkna), vägens profillinje (Z-koordinater) och resultaten av avvattningsanalysen.
Statusen “speciell avvattningsunderhållsklass” bör ges till de vägavsnitt som har tillståndsklass 2 eller 3 och punktsatserna nedan. (Notera: vid utförande av sektioneringen och avvattningsanalysen, definierar alltid den sämre sidans avvattningstillståndsklass medeltillståndet hos avvattningen):
- De vägavsnitt där ökningen i spårdjup är större än 1 mm/år när trafikflödet är <3000 fordon/dag, större än 1,2 mm/år när trafikflödet är >3000/dag och större än 1,4 mm/år när trafikflödet är >5000/dag
- Spårdjupet är markant (>5%) större än det genomsnittliga för de vägavsnitt som har avvattningstillstånd Klass 1
- IRI-värden är betydligt högre än värdena för de vägavsnitt som har avvattningstillstånd Klass 1
- Det finns kantsättninger, kantdjup, längsgående kantsprickor och krackelering
Grusvägsavsnitt som har avvattningstillstånd Klass 2 eller 3, och/eller problem med ojämn tjällyftning, åtminstone på den ena sidan av vägen, bör väljas ut som vägavsnitt för en speciell avvattningsunderhållsklass. Dessutom bör vägavsnitt för speciell avvattningsunderhållsklass övervägas under följande omständigheter:
Diket är anlagt mot högre liggande mark på sidlutande och våt mark och undergrundsjord av blöt morän eller silt.


En väg som ligger i en skärning och undergrundsjorden är antingen morän och/eller silt.
Där undergrunden är våt silt och vägens form har blivit breddad och material från innerslänterna har flutit ner i sidodikena.

När FWD BCI-värden är högre än 80 (med undantag för grundläggning på torv).
Vägavsnitt med speciellt avvattningsunderhåll bör vara homogena, kontinuerliga vägavsnitt, som slutar på identifierbara platser, som vid ett utloppsdike. Vägavsnitt med speciellt avvattningsunderhåll bör definieras var för sig för båda sidor av vägen. Vid användning av dator för att välja start- och slutpunkter vid avvattningsunderhåll, kan videos eller stillbilder med korta intervall ha en viktig roll. Med dem är det möjligt att lokalisera avsnitt för avvattningsunderhåll i logiska längder, där avsnittet alltid kan sluta vid ett fungerande utloppsdike eller en liknande anordning, där vatten kan rinna iväg fritt från vägområdet. .
6.6 Rapportering av resultat från avvattningsanalys
Efter att ha slutfört avvattningsanalysen och identifierat eventuella vägavsnitt för speciellt avvattningsunderhåll kan GIS-kartor skapas för varje vägavsnitt. Dessa kartor bör visa de platser längs vägen där dålig avvattning påverkar vägöverbyggnadens förmåga att motstå permanent deformation och följaktligen platser med spårbildning och tjällyftningsskador. En typisk resultatkarta bör visa vägens centrumlinje, vägens tvärprofil, tillståndsklassen på sido- och utloppsdikena på båda sidor av vägen, den genomsnittliga årliga spårtillväxten (eller senaste spårdjup), och den selekterade avvattningsrehabiliteringen och/eller platser för speciellt avvattningsunderhåll.

Förutom kartor bör alla resultat från avvattningsanalyserna sparas digitalt så att alla analyser och planer kan återvinnas från databasen vid ett senare tillfälle. Detta innebär att att de korrekta koordinaterna måste användas i alla stadier av analysen och rapporterandet. Det är inte acceptabelt att digitalisera vägcentrumlinjer från kartor med användning av pixelkoordinater. De slutliga resultaten av analysen bör lagras så att de kan visas vid ett senare tillfälle på kontoret, eller t o m i ett fordon, tillsammans med stillbilder, med olika vyer och/eller mjukvara för design.
